작은 자율주행 RC카를 만드려고 RPlidar A2를 사용하려고 한다

5핀 커넥터를 사용해 SLAMTEC와 PC와 연결해주고 Lidar와 SLAMTEC 연결
먼저 아래 홈페이지로 들어가 순서대로 실행
https://www.slamtec.com/en/support#rplidar-a-series
support - SLAMTEC Global Network
SLAMTEC provides comprehensive technical documentation and tutorial resources to help customers better understand and use their products. These resources include user manuals, developer documentation, and sample code to help customers get started quickly a
www.slamtec.ai
1. 홈페이지 접속 후 RPlidar A Series 클릭

2. 왼쪽 SDK and Firmware에서 Download 클릭

3. 다운로드 압출을 풀고 CP210xVCPInstaller_x64.exe 실행

4. 장치관리자 포트 확인(COM 뒤 숫자)

5. 다시 Tool 클릭

7. frame_grabber.exe 다운로드

8. frame_grabber.exe 실행

9. Start Scan 시작

10. 프로그램 실행으로 작동된다

마우스 휠을 사용하여 확대 및 축소 할 수 있다
왼쪽 Current : 실시간 거리 측정에서 특정 지점의 거리
Deg : 해당 지점의 각도
아래 Hz : 현재 속도로 초당 12.7회전 - 12.7Hz기준(정확하지 않음)
오른쪽 상단 8K : 현재 초당 스캔된 포인트 수
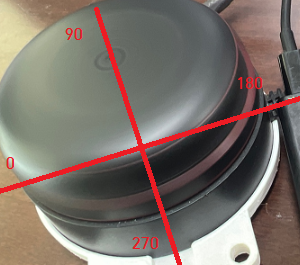
화면 중앙의 원형 배경의 눈금의 가장 바깥쪽 : 각도
중간의 수직선 : 거리(단위 : mm)
다음은 우분투에서 작동시켜 보자!